
一个面向未来机器人的研究实验室
RIL-LAB 由聂强教授创立,隶属于香港科技大学(广州)系统枢纽机器人与自主系统学域。我们希望在机器人智能、学习、理解和操作能力之间建立更紧密的联系,打造真正能够在现实世界中持续学习与协作的机器人系统。
实验室定位
我们致力于打造兼具学术深度与系统落地能力的研究平台,强调算法、系统、硬件与应用场景的协同发展。实验室鼓励有独立思考能力、长期主义与动手能力的研究者,在开放讨论和密切指导中推动高质量研究。
研究方向
我们围绕机器人智能的关键环节展开研究,从感知、决策、控制到学习与操作,形成跨学科、跨层级的研究矩阵,以支持下一代自主机器人系统的发展。
机器人设计及控制
探索机器人结构创新、动力学建模与先进控制算法,构建更智能、更灵活、更可靠的机器人平台。
多模态计算机视觉
研究视觉、语言与其他传感模态的统一理解与生成,提升机器人对复杂环境的感知与适应能力。

智能操作
面向复杂真实场景探索智能操作技术,增强机器人感知、决策与执行的一体化能力。

人机交互
关注人类行为理解、姿态估计、动作预测与协作决策,推动更自然、更高效的人机协同。
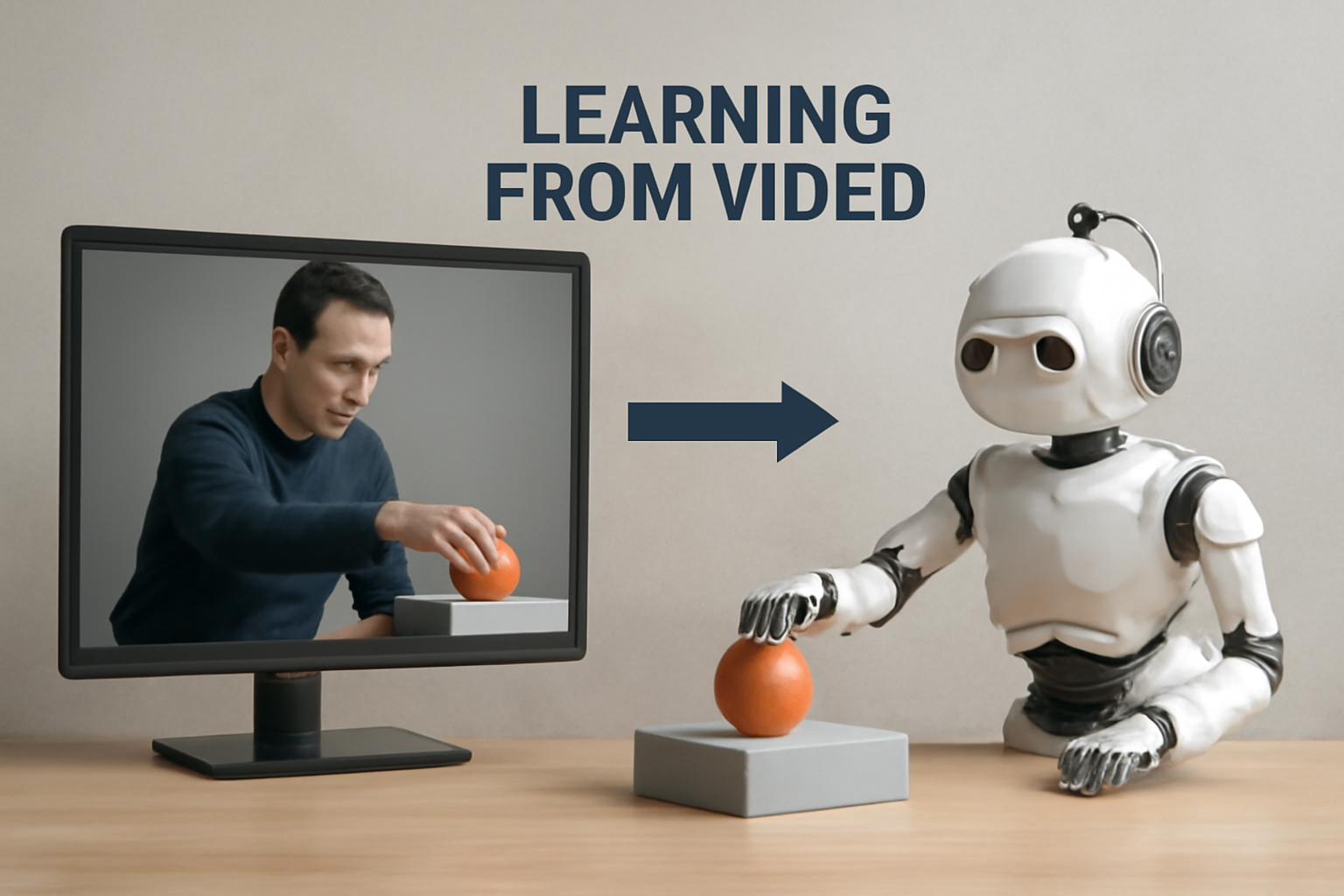
从视频中学习
通过视频理解、行为模仿与技能迁移,让机器人从大规模视觉数据中学习通用能力。
AI Agent
开发具备自主决策与持续优化能力的智能体,让机器人在真实环境中实现更高层级的自主行动。
实验室论文
这里按年份整理实验室已公开的全部论文和研究成果。
2026
3D Dynamics-Aware Manipulation: Endowing Manipulation Policies with 3D Foresight
ICRA 2026
Towards Exploratory and Focused Manipulation with Bimanual Active Perception: A New Problem, Benchmark and Strategy
ICRA 2026
EmbryoDiff: A Conditional Diffusion Framework with Multi-Focal Feature Fusion for Fine-Grained Embryo Developmental Stage Recognition
AAAI 2026
RoboAct-CLIP: Video-Driven Atomic Action Understanding for Robotic Manipulation
2025
Time-Lapse Video-Based Embryo Grading via Complementary Spatial-Temporal Pattern Mining
MICCAI 2025
GenM$^3$: Generative Pretrained Multi-path Motion Model for Text Conditional Human Motion Generation
ICCV 2025
演示视频与项目 Demo
Dual-Arm Robot Opens a Multi-Drawer Storage Box
This video shows a dual-arm robotic system interacting with a multi-drawer storage box.
Text-Annotated Human Motion Demonstration
This video presents a collection of human motion examples paired with short text descriptions. A 3D human character performs various acti...
Humanoid Robot Following Human Instructions
This video shows a humanoid robot interacting with a person in a laboratory setting. The robot responds to instructions by performing han...
Reflex Feedback Improves Robotic Grasp Stability
This video presents a comparison experiment of a robotic grasping system with reflex feedback turned off and on.
团队概览
这里展示导师和团队成员。成员卡片区域可独立滚动,完整资料入口可展开更多信息。

查看完整成员
展开全部 15 位成员的完整资料、教育背景、主页链接和联系方式。
完整成员信息
这里展示资料较完整的成员信息。
张志远
大语言模型, VLA, 强化学习
- 博士 - 香港科技大学(广州)(2024-至今)
- 硕士 - 中国科学院自动化所 (2021-2024)
- 学士 - 中国科学院大学 (2017-2021)
孙泳
石珺予
闫丹琪
张正杰
何羽鑫
视频学习, 具身世界模型
- 博士 - 香港科技大学(广州) (2025-至今)
- 硕士 - 哈尔滨工业大学(深圳) (2021-2024)
- 学士 - 中山大学 (2017-2021)
Pantita Peuchpen
人机交互,机器人控制
刘丽江
戴欣怡
刘铖
冯紫嫣
马艺琴
伍灏庭
华宝杨
李嘉成
欢迎加入我们
我们招收对机器人与人工智能研究有兴趣的博士生、硕士生、研究助理和实习生。
我们希望看到的申请者
- 对机器人、人工智能、多模态理解或相关方向有真实兴趣,愿意长期投入研究。
- 具备良好的数理基础与编程能力,能独立思考并主动推动问题。
- 具备相关研究经验者优先,如机械设计、控制、计算机视觉、人机交互等。
- 博士申请者需满足相应入学要求;非博士岗位亦欢迎有潜力的优秀同学申请。
你将获得什么
- 前沿交叉研究方向,面向真实机器人系统和长期学术价值。
- 细致稳定的导师指导,每周有一对一讨论与研究交流机会。
- 国际化研究环境与大湾区区位优势,便于连接学术与产业场景。
- 博士生岗位提供有竞争力的奖学金,其他岗位亦有相应支持与待遇。

